Abstract
Adverse weather conditions can severely affect the performance of LiDAR sensors by introducing unwanted noise in the measurements. Therefore, differentiating between noise and valid points is crucial for the reliable use of these sensors. Current approaches for detecting adverse weather points require large amounts of labeled data, which can be difficult and expensive to obtain. This paper proposes a label-efficient approach to segment LiDAR point clouds in adverse weather. We develop a framework that uses few-shot semantic segmentation to learn to segment adverse weather points from only a few labeled examples. Then, we use a semi-supervised learning approach to generate pseudo-labels for unlabelled point clouds, significantly increasing the amount of training data without requiring any additional labeling. We also integrate good weather data in our training pipeline, allowing for high performance in both good and adverse weather conditions. Results on real and synthetic datasets show that our method performs well in detecting snow, fog, and spray. Furthermore, we achieve competitive performance against fully supervised methods while using only a fraction of labeled data.
Method
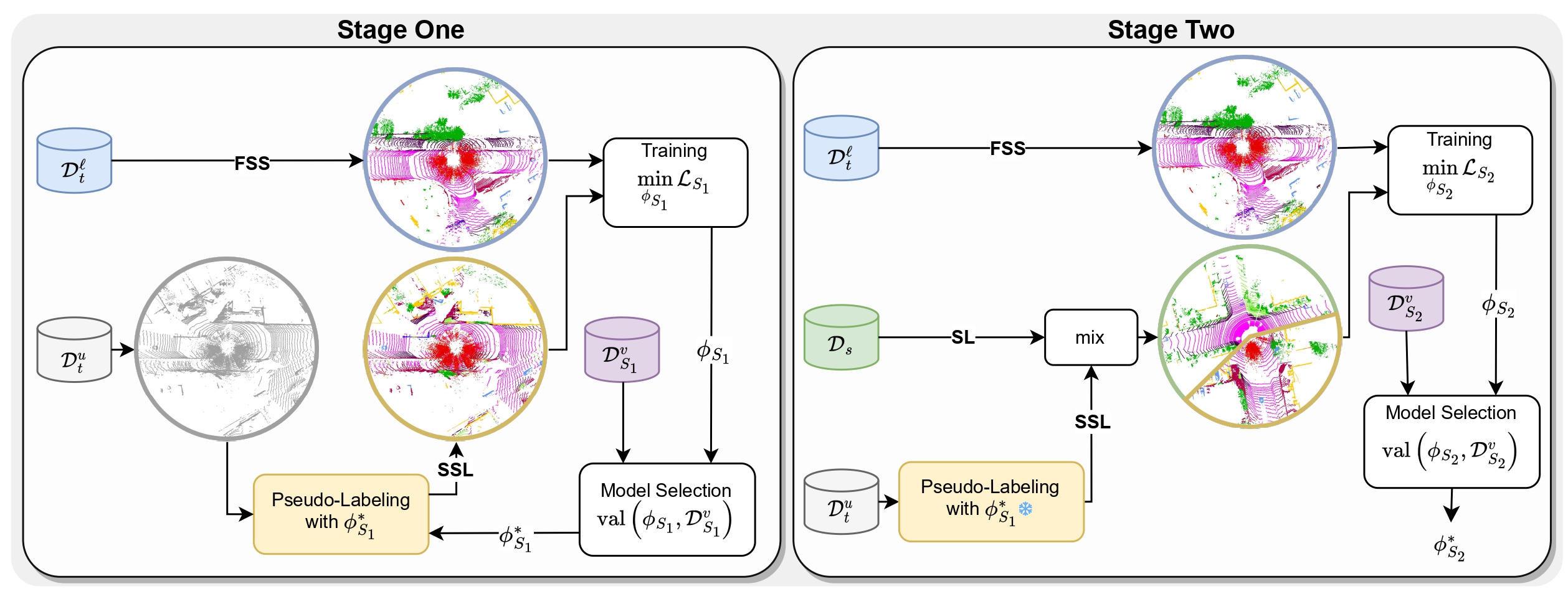
Overview of our method.
Stage One: we aim to train a model \(\phi_{S_1}\) that performs well in adverse weather scenes.
We use few-shot semantic segmentation (FSS) to learn from the labeled dataset \(\mathcal{D}_t^\ell\)
(adverse weather).
We iteratively select the best-performing model \(\phi_{S_1}^*\) by validating the performance of
\(\phi_{S_1}\) on the pseudo-validation set \(\mathcal{D}_{S_1}^v\).
To obtain additional training data without increasing the labeling effort, we generate pseudo-labels for
the unlabelled target dataset \(\mathcal{D}_t^u\) using \(\phi_{S_1}^*\) and train with them in a
semi-supervised learning (SSL) fashion.
Stage Two: we aim to train a new model \(\phi_{S_2}\) that performs well in both good and adverse
weather.
We use FSS training like in the previous stage.
Additionally, we combine pseudo-labels generated from the resulting model \(\phi_{S_1}^*\) of Stage One
with labeled data sampled from \(\mathcal{D}_s\) (good weather) using polar data mixing and train with
them using a combination of supervised-learning (SL) and SSL.
We select the best-performing model \(\phi_{S_2}^*\) by validating \(\phi_{S_2}\) on the pseudo-validation
set \(\mathcal{D}_{S_2}^v\).
Citation
@article{10517394,
author = {Piroli, Aldi and Dallabetta, Vinzenz and Kopp, Johannes and Walessa, Marc and Meissner, Daniel and Dietmayer, Klaus},
journal = {IEEE Robotics and Automation Letters},
title = {Label-Efficient Semantic Segmentation of LiDAR Point Clouds in Adverse Weather Conditions},
year = {2024},
volume = {9},
number = {6},
pages = {5575-5582},
keywords = {Meteorology;Point cloud compression;Laser radar;Semantic segmentation;Training;Snow;Noise;Computers and information processing;machine vision;object segmentation},
doi = {10.1109/LRA.2024.3396099}
}